
This tutorial aims to help you understand the basics of multirotor motors and propellers, which will help you choose the suitable motor and propellers for your quadcopter build. There are some general rules you can follow, and considerations to bear in mind when choosing the optimal and effective motor and propeller combination.
Where to Start? Decide on Motor Size First
To begin with, you need to answer these 2 questions:
- What’s your quadcopter’s planned total weight ?
- What’s the size of your frame?
The total weight of the quadcopter can be your best guess, as you haven’t built it yet. It should include everything: frame, FC, PDB, wires, motors, ESC’s, battery, payload (such as HD camera and gimbals), etc. Remember this is just an estimation so you can always go back and update the number when you have better idea which parts you are going to get.
By knowing the size of the frame, you should know what the maximum propeller size can be used.
By knowing these 2 things, you can now calculate roughly how much thrust the motors need to deliver to lift it in the air, by using propellers of limited size.
2:1 Thrust to Weight Ratio
A general rule is that you should AT LEAST be able to provide twice as much thrust than the weight of the quad. This is the bare minimum to ensure you have a stable copter that is easy to control during hovering 🙂 If the thrust provided by the motors are too little, the quad would not respond well to your control, it might even have difficulties to take off.
For example if we had a quadcopter that weights 1kg, the total thrust generated by the motors at 100% throttle should be at least 2kg, or 500g per motor (for a quadcopter).
For faster flying like drone racing, you should expect the ratio to go much higher than this. It’s not uncommon to see someone build a mini quad that can achieve 8:1, even 10:1 thrust to weight ratio. The quad’s performance would be much more agile and dynamic, it would accelerate much faster and corner better. But when you have excessively high thrust to weight ratio, the quad would become very hard to control, because a little increase in throttle is enough to “shoot the quad in to orbit”. 🙂
My recommendation is, even if you only just plan to fly the multirotor as a slow aerial photography platform, you might want to aim at somewhere between 3:1 and 4:1. Not only it gives you better controllability, but also the room for adding extra payload in the future (like heavier cameras, or maybe extra batteries to extend flight time)
Motor Size and KV
Brushless motors in RC is normally indicated by a 4-digit number – AABB. “AA” being the stator width, and “BB” being the stator height. Basically, the wider and taller the motor is, the more torque it can generate.
KV is another important parameter, it’s the theoretical increase of motor RPM (rotation per minute) when voltage go up by 1 volt without load. For example, when powering a 2300KV motors with a 3S LiPo battery (12.6V), the motor would spin at about 28980 RPM. This is just an estimation by the way.
But once you mounted a propeller on the motor, the RPM won’t be that high due to resistance. Higher KV motors would attempt to spin the propeller faster, but lower KV motors normally generate higher torque. That’s why we tend to see larger props are paired with low KV motors, and smaller props with high KV motors. (You can alter the KV of a motor by reducing or increasing the number of copper wire winding in the motor!)
It’s important to find a balance between RPM and torque when choosing motor and propeller.
By pairing high KV motors with excessively large propellers, the motor will attempt to spin it fast like they would do with smaller props, and therefore drawing too much current and generating too much heat. Eventually it could burn out the motor due to overheat and shorts in motor coils.
N and P
You might sometimes see something like “12N14P”. The number before the letter N means the number of electromagents in stator, and the number before P means the number of permanent magnets in the motor.
Most motors have the same 12N14P configuration, some lower KV motors would have more electromagnets and permanent magnets to help increase torque more efficiently (and thus more expensive). While it’s good to know what this is, it’s not an essential piece of information when picking motors.
Frame Size => Prop Size => Motor Size and KV
Most of the times by knowing frame size, we can estimate what sort of motor we should use. This is because frame size limits props size, and prop size limits motor size and KV. But anyway, always check motor thrust test data to verify the current draw does not exceed safety rating of the motor, when pairing the propellers you want to run.
This table is only a simplified example to give you some ideas and assumes you are running 4S LiPo battereies, you might see people using slightly higher or lower KV motors than this table suggests. Frame size is referring to wheelbase (aka diagonal motor to motor distance).
| Frame Size | Prop Size | Motor Size | KV |
| 150mm or smaller | 3″ or smaller | 1306 or smaller | 3000KV or higher |
| 180mm | 4″ | 1806 | 2600KV |
| 210mm | 5″ | 2204-2206 | 2300KV-2600KV |
| 250mm | 6″ | 2204-2208 | 2000KV-2300KV |
| 350mm | 7″ | 2208 | 1600KV |
| 450mm | 8″, 9″, 10″ | 2212 or larger | 1000KV or lower |
Voltage and Current Draw
It’s also important to understand that voltage will have a large impact on your motor and propeller choice. Your motor will try to spin much harder when a higher voltage is applied, and thus drawing a higher current. Always check thrust data first.
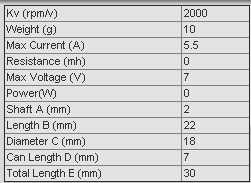
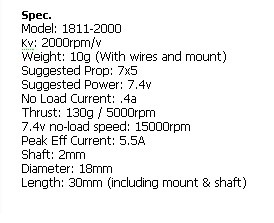
Reading Motor Spec

When selecting motors, there is usually specification that comes with the motor provided by the seller or manufacturer. You should be able to find information about the power, thrust, rpm etc. This is an example of the 18-11 2000kv Micro Brushless Outrunner (10g).
Comparing between motors
After you have decided on the size and KV of the motors you want to get, you might already have a handful of motors to choose from. To pick the best motor for your application, you should consider the following factors:
- Thrust
- Current Draw
- Efficiency
- Weight – Moment of Inertia
The decision here really depends on your preference, how you want your aircraft to perform.
Higher thrust gives you top speed, but you also need to look at efficiency, making sure it’s not using a ridiculous amount of power that is exceed what your hardware can support.
Also your choice of motor and propeller can affect your choice of batteries too. If your quad could draw a large amount of current at full throttle, your battery’s max discharge rate has to be able to keep up in order to provide the power, as well as they don’t overheat and go buff (check out C rating).
One thing that often get overlooked is motor weight, it’s more important in racing drones. It doesn’t only affect the total weight of your quadcopter and thrust to weight ratio, it also affects the moment of inertia of your quad. When your quad is doing flips and rolls for example, it takes some time to pick up the angular acceleration and eventually move to the desired position. If your motors are heavy, it will take the quadcopter longer to do this, and therefore feels less responsive.
It’s all about balance really, or which area you want your copter to excel at.
More tips on Motor Efficiency
A multicopter is more efficient when it’s as light as possible. This post shows you how to find the perfect balance when choosing LiPo batteries for your multicopter.
Battery and weight is not the only factor we need to consider when it comes to overall power efficiency. When choosing motors, apart from motor KV and thrust, we also need to look at motor efficiency.
It’s like cycling, cycle at lower gear enable you to go faster but it’s harder to peddle. If you are going uphill, and it’s getting steeper, you will eventually come to a point where peddling becomes too heavy and you are getting slower although you are peddling very hard. This is where you lose efficiency.
The same applies to brushless motor, the higher efficiency the better. A 70% efficient motor produces 70% power and 30% heat. A 90% efficient motor produces 90% power and 10% heat.
With less efficient motors not only are you wasting a lot of energy (and thus flight time), you also get little thrust on full throttle. Most importantly, because the motor runs so inefficiently, the response time suffers. It will take the motors longer to reach desired RPM and this will have negative influence on stability and responsiveness.
Other Factors Manufacturers Don’t Tell You
- Response
- Temperature (explain more in future update)
- Best props (explain more in future update)
- Vibration (explain more in future update)
Response – how fast the motor can change RPM. Easiest way to find out about this is by measuring how long it takes for a motor to go from 0 RPM to full RPM. This obviously will have an effect on how responsive the motors are.
If you can find the following data somewhere it can help you even more to identify the best motor for your choice.
Features of Motors that Might Interest You
(explain more in future update)
- Solid/Hollow shaft
- Type of Magnets (N52, N54)
- Arc Magnets
- Smaller air gaps
- Soldering tabs on motor
- ESC integration
- Cooling design
Balancing Motor
After you received your motors, the first thing you should do is to balance it. Although it’s not always necessary, it’s good practice. I personally only do this on large motors though like 2212 or bigger. For mini quad motors I normally find balancing not necessary. (2206 or smaller)
There are so many options, brands you can choose from, it will cause you headache 😀 For example these are the options for 250 mini quad motors.
CW and CCW Motors
Basically the difference of CW and CCW motor is the prop shaft thread rotation. The intention is to use 2 CW motors and 2 CCW motors on a quad, so that when the motors spin, all four prop nuts lock themselves down. It really matter which one you pick as they are identical motors except the prop shaft thread. But I personally prefer to get all motors of the same threads so I don’t confuse myself with the different prop nuts.
Choosing Propellers
Propellers generate thrust by spinning and moving air. The more air it can move, the more thrust it will generate.

The Basics – Size/Pitch
On every quadcopter, there are two CW (clockwise) and two CCW (counter-clockwise) propellers. There are propellers of different length and pitch. For example 9×4.7 (sometimes 9047) propellers are 9 inch long and has a pitch of 4.7 inch. 5x3x3 (sometimes 5030×3) means 3-blade 5″ propeller that has a pitch of 3 inch.
The Size of a propeller is measured from tip to tip, and it’s sometimes called diameter, as when you spin up a prop you get a circle and the diameter is the size of the prop.
Pitch is sometimes called pitch length too, which can be defined as the travel distance of one single prop rotation.
Generally, either increased propeller pitch or diameter will lead to higher current draw, because more air is moved (assuming RPM is the same), and it gets harder to spin. In a nutshell, larger propeller or higher pitch length will increase your vehicle speed but also use more power.

Effects of Prop Size and Pitch
When deciding on prop size, length and pitch, you need to find a good balance.
Generally a prop with lower pitch numbers can spin faster (higher RPM), the motors don’t need to work as hard to spin it so it pulls less current. If you want to do acrobatics, you will need lower pitch propellers which provide higher acceleration and it puts less pressure on the power system. Lower pitch propellers will also improve stability.
A higher pitch propeller moves greater amount of air, which could create turbulence and cause more prop wash. It generates more thrust in the expense of higher current draw, but giving you higher top speed.
A smaller prop is easier to stop and speed up while a larger prop takes longer to change RPM due to inertia.
Material
Propellers can be made of different materials, plastic, carbon fibre, wood etc. Each type of material gives unique features, for example carbon fibre and wooden props are stiff and best known for their smooth performance, certain plastic compound are very durable… check out this post for more info.
Shape
The shape of the propeller also plays a big part in performance. The most distinctive difference would probably be the tip of the props: pointy nose, bull nose (BN) and Hybrid bullnose (HBN). Basically for propellers that are the same size and pitch, pointy tip props are the most efficient however pulls less thrust. Bullnose props can pull higher in thrust number, however they also draw a lot more current. This is due to the fact that they have a larger surface area than than the pointy tip props. And HBN props is in between the two.

Number of Blades
The most common propellers are probably 2 blades (or dual-blade). The next up is Tri-blade which is also very popular among racers and freestylers. You can sometimes even see quad-blade and even hex-blade. Basically, the more blade a prop has, the more surface area and thus can generate more thrust. However that also leads to higher current draw and lower efficiency.

Testing is Only for Reference
It’s important to check out motor thrust tests, and see which props work better with the motors you plan to run. Same propeller can perform very differently on 2 different motors.
Even the for props of the same size and pitch, when they are made of different material and by different manufacturers, the performance also tend to be very different. Here is an example where I compare the 5030 props of two different brands.
However these bench tests are done in static environment, and therefore it doesn’t represent the motor/propellers true performance in the wild – where air are moving and there are many other factors that can have some effect on it. One of the most noticeable difference between static bench test and real flight is motor thrust, which is normally 5%-10% less in real flight than in static bench test.
Conclusion
With a well balanced motor and propeller combination, your quadcopter should achieve great efficiency, not only improve battery life time, but also allows great user control experience. Hope this post has helped you select the best motor and propellers, and don’t hesitate to share your ideas or questions with us.:-)
Original source: OscarLiang









